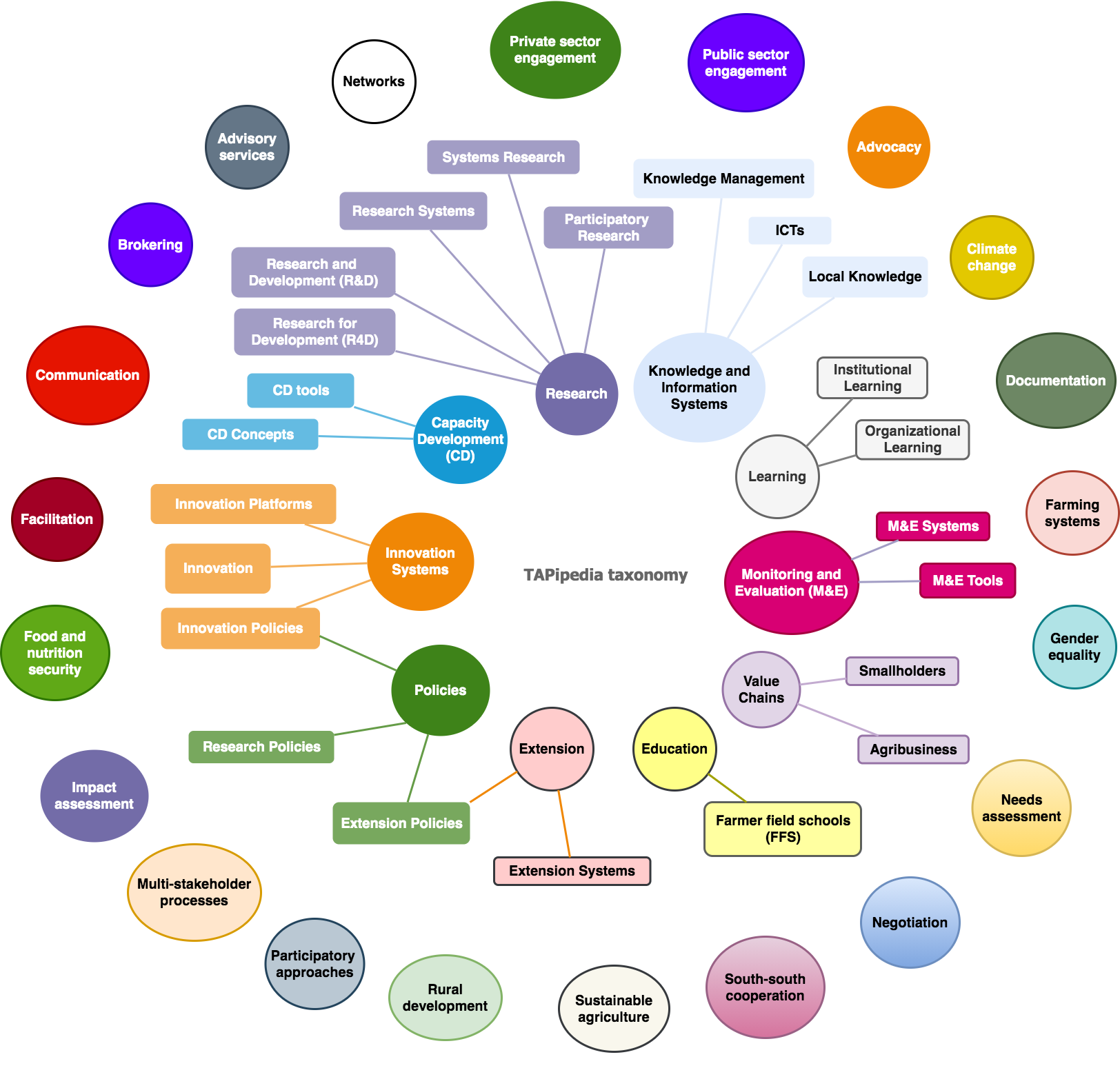
En TAPipedia puedes acceder a un repositorio de alta calidad y agregar tus propios recursos relacionados con el desarrollo de capacidades para la innovación agrícola. También puede descubrir la red de socios de la TAP y otras organizaciones que trabajan en apoyo de la innovación agrícola. En TAPipedia también encontrará una versión interactiva del Marco Común de la TAP, que brinda orientación para comprender mejor la arquitectura de los sistemas de innovación agrícola, evaluar las necesidades de desarrollo de capacidades y planificar, implementar, monitorear y evaluar intervenciones de desarrollo de capacidades.
Puede compartir sus recursos como individuo o como parte de una organización, después de un registro rápido aquí.